Fighting Specification Gaming with Verifiable Rewards for Evaluations
Defining what we require from generative models has become a geometry problem. A prompt describes intent, but the model optimizes whatever signal it can see. That gap is where Specification Gaming shows up: the output can satisfy the letter of a requirement while missing the behavior we actually wanted. The growing adoption of RLVR (Reinforcement Learning with Verifiable Rewards)[1] makes this more concrete by moving part of the objective into checkable, reproducible rewards. But the hard part remains. The evaluation system becomes the environment, and its design determines what “good” actually means.
Mermaid diagrams are a useful stress test for this. They sit at the intersection of structural and semantic correctness. A diagram can render syntactically valid while being semantically incoherent, or it can represent the right concept but be poorly composed. The constraint space is narrow: the output must be both machine-parseable and human-interpretable, and the mapping from natural language query to diagram type is genuinely ambiguous. This makes Mermaid generation a good testbed for reward design because specification gaming has obvious failure modes. This post documents that design process. I’ll cover three simple agent architectures, the rubric construction, how reward signals were composed to prevent gaming, and finally where the approach reaches its limits in closing the learning loop.
Experimental Setup
Three agents. Same prompt distribution. Different levels of structural guidance and verbosity. The goal was simple in theory: find which prompt architecture best navigates the constrained output space where a diagram is both renderable and semantically correct. In practice, the agents diverged in interesting and sometimes frustrating ways.
%%caption: RLVR-style verifier loop used for manual policy iteration. Reward=0.59.
sequenceDiagram
participant P as Prompt(s)
participant π as Policy/Agent (π)
participant A as Action (a)
participant E as Verifier (E)
participant R as Reward Function<br/>(with θ)
participant H as Human Optimizer
loop Verifiable reward loop
P->>π: Provide prompt
π->>A: Generate action
A->>E: Execute action
E->>R: Evaluate
R->>E: Compute reward
R->>H: Return reward diagnostics
H->>π: Revise prompt or routing policy
endThis is not a claim that prompts were trained with policy gradients. The loop is a methodology for reward modeling and manual policy iteration: generate outputs, score them with the same verifier, inspect drift, then revise the agent policy with cleaner evidence than open-ended taste.
Streamlining queries -
The prompt synthesizer generated ~1.2k queries spanning four domains: technology, astrophysics, economics, and movie plot summaries. The domains were picked deliberately to stress-test diagram generalization across timeline diagrams for plot arcs, concept maps for economic systems, and entity relationships for scientific hierarchies. The distribution was not uniform. It was biased toward cases where diagram type selection would be ambiguous because that is where the agents were most likely to diverge.
Agents and agentic workflows -
The three agents were not just prompt variants. They represented different hypotheses about what makes a good diagram generation policy. The third agent also changed structure after the first pass, once its actions could be observed and compared against the others.
Agent 1 ran a baseline prompt: simple linear guidance, no explicit chart type list, weak structural constraints. The hypothesis was that the model already knows what a good diagram looks like and just needs a light nudge.
Agent 2 switched to an XML-formatted prompt, introduced forced chart type selection from an explicit list, and added more verbose guidance on Mermaid diagram quality. The hypothesis was simple: give the model more structure, get more structured outputs.
Agent 3 added an intermediate rewrite step: a 2-step pipeline where the query is first rewritten as a candidate diagram specification, then rendered. It used an explicit Mermaid type list, a stronger task profile, and XML formatting throughout. It was the most engineered of the three.

The result that surprised me most: Agent 1 won. The simplest agent. Agent 3, the most carefully constructed, followed after. More about it later.
Defining an Environment/Verifier -
With repeated testing, the verifier settled into two layers. First, render validity is a 0-1 hard gate: invalid Mermaid gets zero reward. If it renders, the scalar reward combines 65% Judge-LM semantics, 10% contextual alignment, and 25% bounded verbosity. That split matters because format is not a soft preference. It is the permission to score anything else.
Judge-LM
The Judge-LM rubric came from repeated review of favorable behaviors, unfavorable behaviors, and failure points in the problem space.
# all numeric fields are scaled from 0-5 delivering a Likert-based Rubric
class JudgeLMCriteria():
diagram_type_relevance: int # relevance to the right use of diagram style
entity_alignment: int # checks factual coverage
relation_correctness: int # edge correctness
abstraction_quality: int # rewards the right compression level for details
structural_logic: int # difficulty in decomposing structure
chain_reasonability: int # can someone trace along the logic
rationale: str # concise explanation for above metrics (~30 words)
contextual_relevance: float # generated-graph alignment with queryThe six Likert dimensions are not independent, and that is by design. Entity alignment and relation correctness move together. Structural logic and chain reasonability cluster. This internal correlation is useful: it means the judge is self-consistent, and it shrinks the surface area for reward hacking. Fewer orthogonal axes means fewer places for the model to score well on one metric while quietly degrading another.
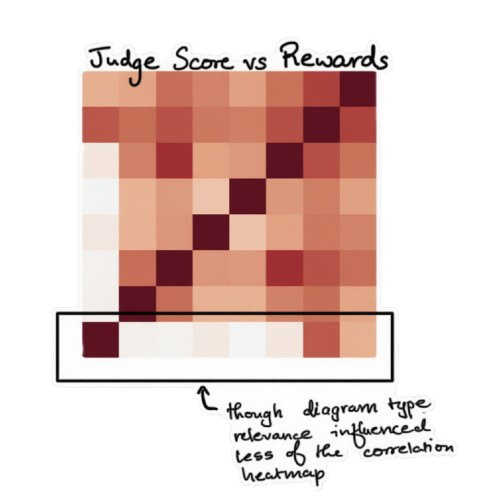
The correlation heatmap in fig is useful because it shows the judge isn’t acting like a bag of unrelated checks. The stronger blocks cluster where you’d expect them to. Entity alignment moves with relation correctness, and structural logic tends to move with chain reasonability. Reward tracks positively with most of the semantic dimensions, but not equally, which is exactly the point of the composite design.
Rule-Based Scoring
def verbosity(mermaid_text):
# Count structural elements
node_count, edge_count = counts(mermaid_text)
# Weighted raw complexity score
raw = float(node_count + 0.5 * edge_count)
# Range-bounded score
# approaches 5.0 as raw grows
score = 5.0 * raw / (raw + 10.0)
return scoreThe verbosity score is soft-bounded. It never hits 5.0, it asymptotes toward it. This matters because it removes the incentive to dump nodes into a diagram. The marginal reward for adding more structure keeps shrinking, so graph inflation does not become an easy reward hack.
Designing Scalar Rewards -
Scalar reward design is the make-or-break point. A stronger version of this project would fit a reward model from labeled outcomes, but the useful first slice was explicit: compose the features by hand, then stress-test the weighting. Because several Judge-LM dimensions are correlated, I kept them inside one semantic score instead of pretending every axis was independent.
J = mean(judge_metrics) # semantic correctness (0 to 1)
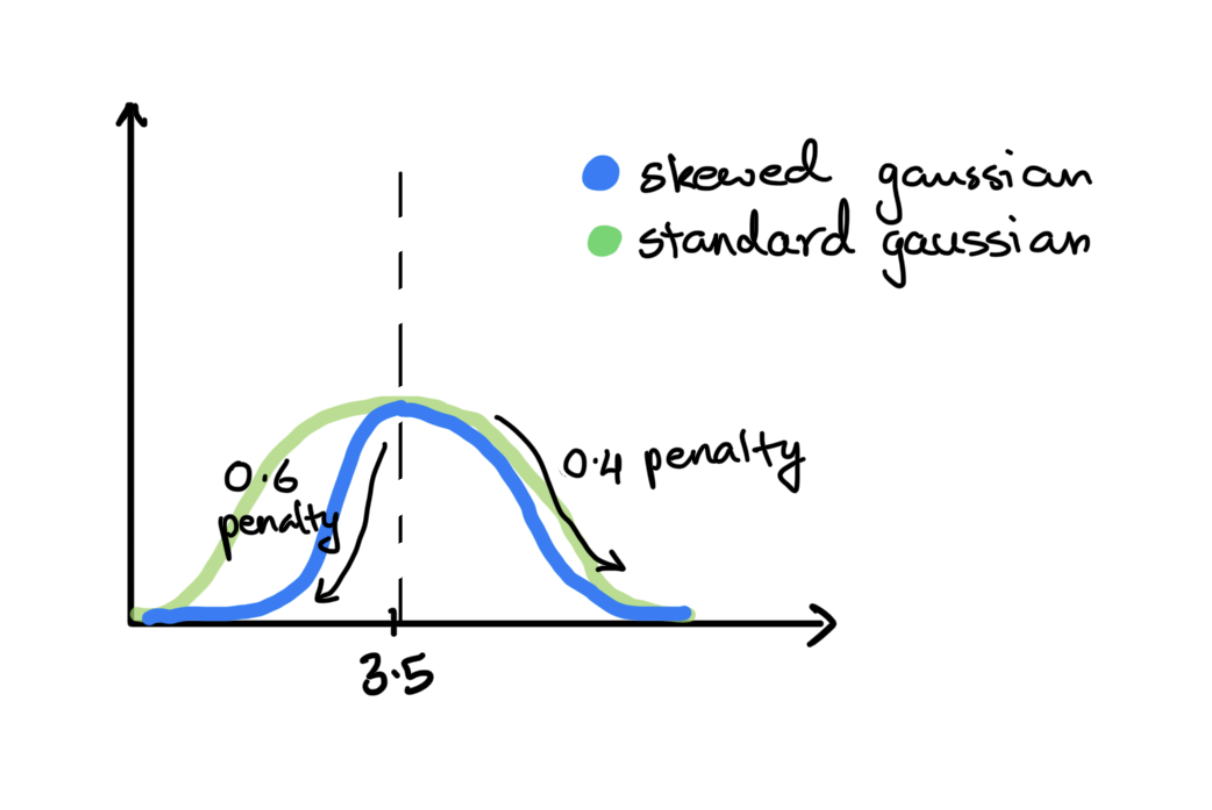
V = asymmetric_gaussian(verbosity, 3.5) # left_arm=0.4, right_arm=0.6
R = 0 if not render_valid else 0.65*J + 0.10*context + 0.25*V
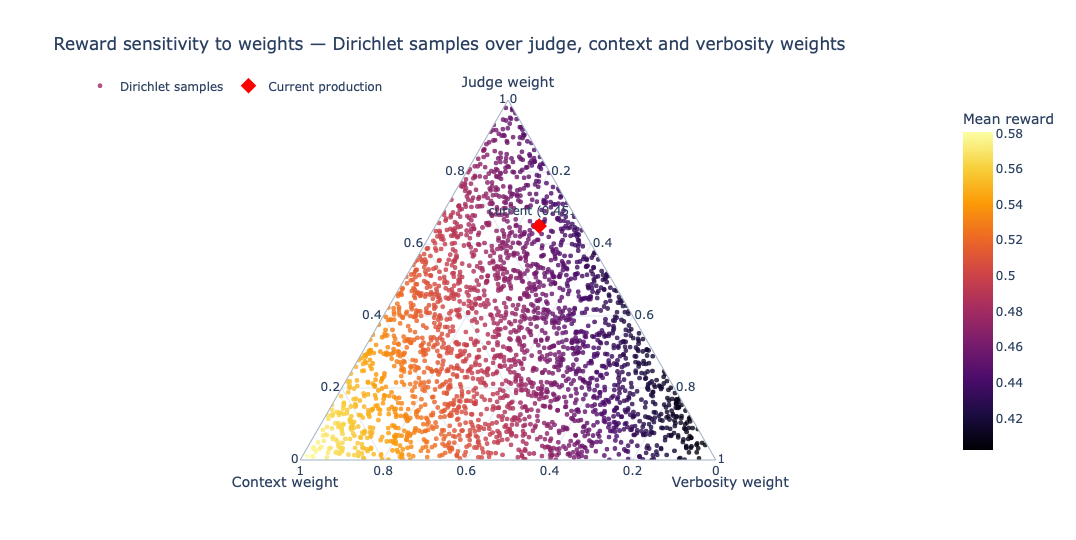
return round(R, 4)I used Dirichlet sampling to watch where mean reward stayed high and stable. The triangular heatmap below is the actual search. Each point is one sampled weight split across judge, context, and verbosity, and the color shows the resulting mean reward. The red dot is the current production weight mix. High judge weight consistently outperformed.
The asymmetric Gaussian on verbosity is worth calling out specifically. 3.5 was empirically the sweet spot that separated genuinely well-structured diagrams from mediocre ones. Below 3.5, the narrower left arm penalizes missing structure more aggressively. Above 3.5, the wider right arm tapers more gently. The asymmetry means the model is penalized harder for under-specifying than for over-specifying.
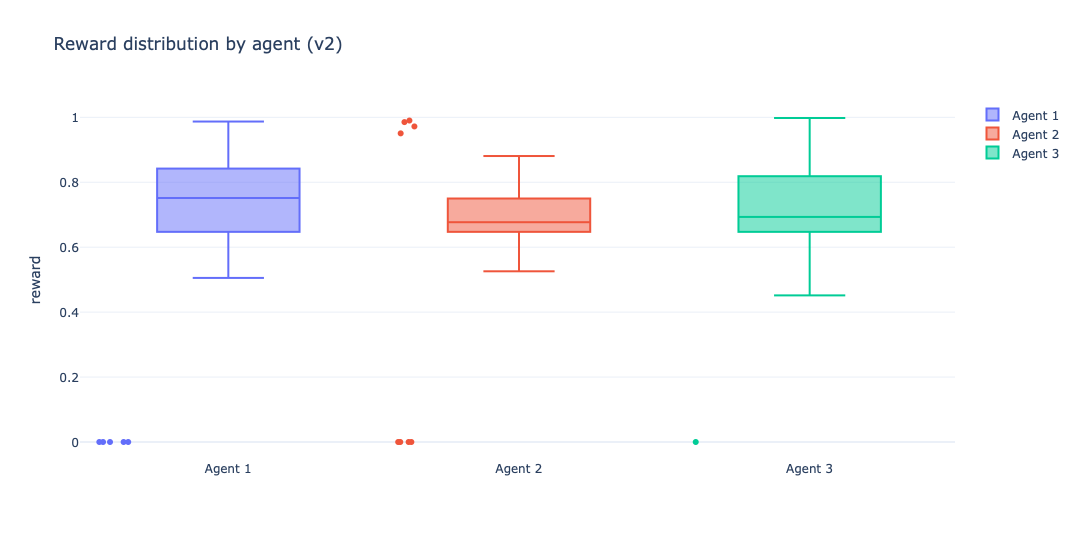
Observations on responses -
This is the point where aggregate reward stops being enough and the shape of responses starts to matter. The response distribution tells whether an agent is reliably good, occasionally great, or just volatile under the same evaluator.
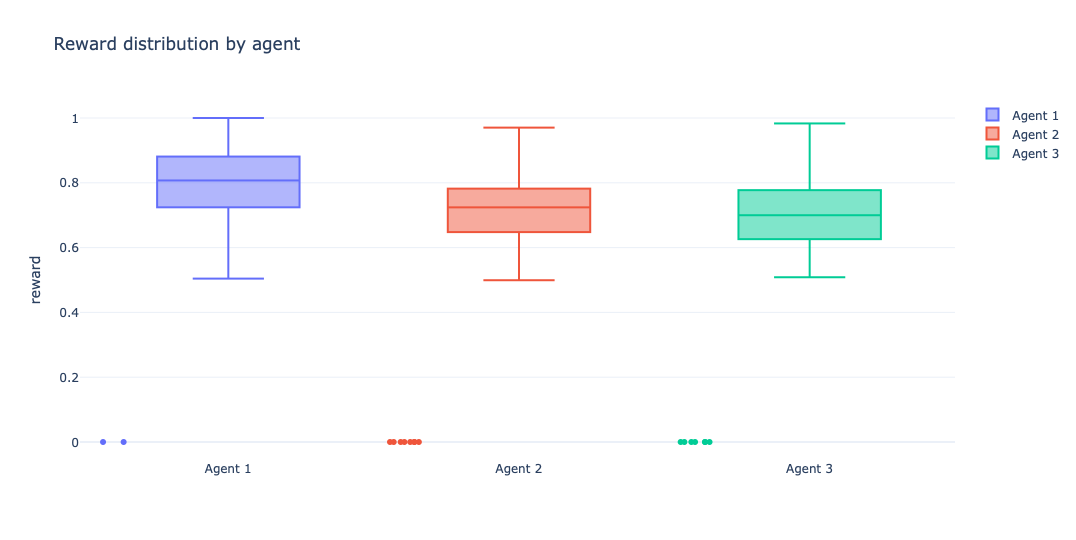
This plot is where the story becomes less about averages and more about behavior. Agent 1 does not just win on mean reward. Its median sits higher and its interquartile range is tighter, which is exactly what you want from a baseline in production-like evaluation loops: less drama, fewer surprises. Agents 2 and 3 both show broader spread with lower central tendency, which reads less like “more expressive policy” and more like unstable reward capture under extra structure.
The near-zero outliers across all three are also useful to keep in view. These are likely hard render failures (invalid Mermaid or parser-breaking outputs), which makes them a shared failure mode of the task/verifier pipeline rather than something unique to a single agent. The difference is frequency and recovery: Agent 1 still clusters in the high-reward region more consistently, while the more engineered variants pay a variance tax for the added scaffolding.
Manual Policy Iteration -
This is where I need to be precise. This is not strict RL training. There is no policy-gradient optimizer changing a model from reward traces. The reward signal is real and informative, but the optimizer is me, editing prompts and routing logic after inspecting the diagnostics. The gotcha is not technical. It is architectural.
So I treat this section as policy iteration in spirit, not in the strict training sense: observe failures, revise the agent policies, and re-run the same evaluation environment.
After observing the first pass, I made one coordinated update across all three agents. Agent 3 changed the most by becoming a routing policy that runs Agent 1 and Agent 2 as candidate generators, then uses a discriminator step to pick the better output of the two.
The next four plots diagnose whether the revised policies improved stability, win behavior, and judge-metric drift.
The second-pass scatter and distributions make the tradeoff clearer. Agent 3 becomes more structured, but the routing/discriminator design does not automatically convert into better rewards. It improves control over the generation process, but it also introduces more places where selection or formatting can fail. My rough read from the second pass is that catastrophic failures come down, but the central reward still does not overtake Agent 1.

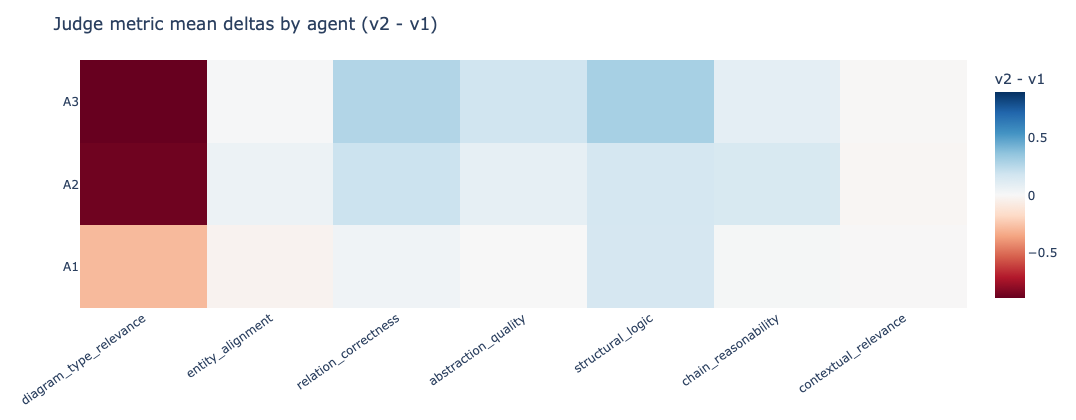
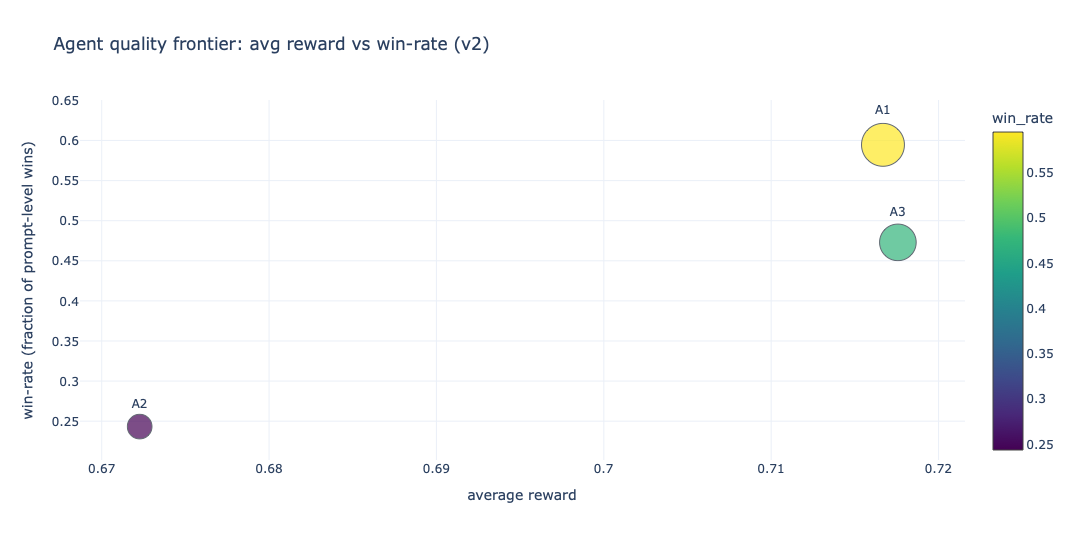
The prompt-level win-rate plot is the most direct signal here because it shows where one agent actually beats the others on the same set of prompts. This is the chart I would use in a hiring review because it translates to a practical question: did the redesign improve task success rate, and by how much? In my case the gains are uneven rather than universal. Some prompt families move by visible double-digit percentages, while others stay flat or regress. The drift heatmap is the complement. Instead of showing wins, it shows which judge dimensions moved and in what direction after the redesign.
The rolling reward trends below give the temporal view. Early variance is high, then the curves settle, and Agent 1 stays above the others. Visually, the variance envelope does tighten after the early windows (roughly a ~20-30% stability improvement in the better runs), but that stability gain is not the same thing as policy superiority. That looks like learning, but it’s just the early variance over the synthetic prompt distribution.
The reward distributions remain the most compact summary of behavior. They show spread, outliers, and median shift in one view. They also make the variance tax visible: the more engineered variants still carry a wider spread, and Agent 3 does not dominate despite being the most structured design.
Conclusion - The Hard Parts Redefined
The simplest agent won. The most verbose setup reward-hacked itself into mediocrity. The lesson is not that simplicity always wins. It is that a verifier has to be designed against the specific failure modes of the task, not against a generic rubric. The only way to find those failure modes is to watch the model fail repeatedly with instruments on. This is precisely the design space modern evaluation platforms are exploring[2]: treating structured verification as infrastructure rather than an afterthought.
This is not a replacement for RLHF. It is closer to a 2FA layer for pre-deployment: a way to make behavioral goals explicit and measurable before you let a model near real users. The real unlock here is commoditizing the attention you’d otherwise spend on open-ended human eval. With a well-designed verifier, the human in the loop stops being the bottleneck for judging outputs and becomes the designer of the policy. That’s a better use of the loop.
I’ve linked a markdown export of the implementation details, though the Marimo notebook is the better source of truth.